
Chitturi Sidhartha, Lalit Manam, Venu Madhav Govindu
Geometric estimation problems in vision are often solved via minimization of statistical loss functions which account for the presence of outliers in the observations. The corresponding energy landscape often has many local minima. Many approaches attempt to avoid local minima by annealing the scale parameter of loss functions using methods such as graduated non-convexity (GNC). However, little attention has been paid to the annealing schedule, which is often carried out in a fixed manner, resulting in a poor speed-accuracy trade-off and unreliable convergence to the global minimum. In this paper, we propose a principled approach for adaptively annealing the scale for GNC by tracking the positive-definiteness (i.e. local convexity) of the Hessian of the cost function. We illustrate our approach using the classic problem of registering 3D correspondences in the presence of noise and outliers. We also develop approximations to the Hessian that significantly speeds up our method. The effectiveness of our approach is validated by comparing its performance with state-of-the-art 3D registration approaches on a number of synthetic and real datasets. Our approach is accurate and efficient and converges to the global solution more reliably than the state-of-the-art methods.
| GNC Strategy | # of stages in GNC | Accuracy |
| Small \( \gamma \) (fixed) | \(\boldsymbol{\uparrow}\) | \(\boldsymbol{\uparrow}\) |
| Large \( \gamma \) (fixed) | \(\boldsymbol{\downarrow}\) | \(\boldsymbol{\downarrow}\) |
| Adaptive \( \gamma \) [Ours] | \(\boldsymbol{\downarrow}\) | \(\boldsymbol{\uparrow}\) |
| Desirable | \(\boldsymbol{\downarrow}\) | \(\boldsymbol{\uparrow}\) |
Table 1. Impact of different annealing schemes
Method
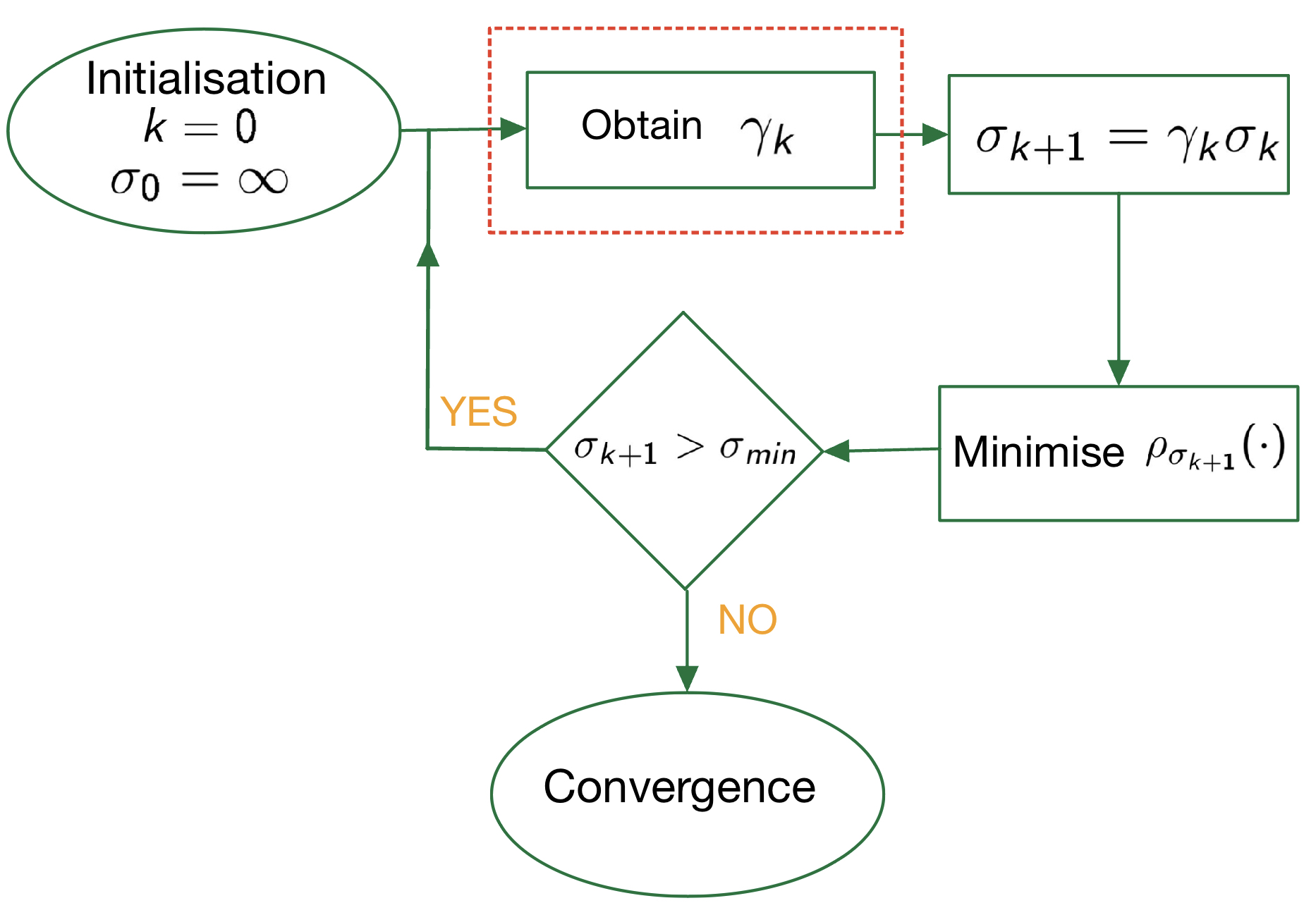
The steps can be summarized as follows:Illustration on Pairwise 3D Registration
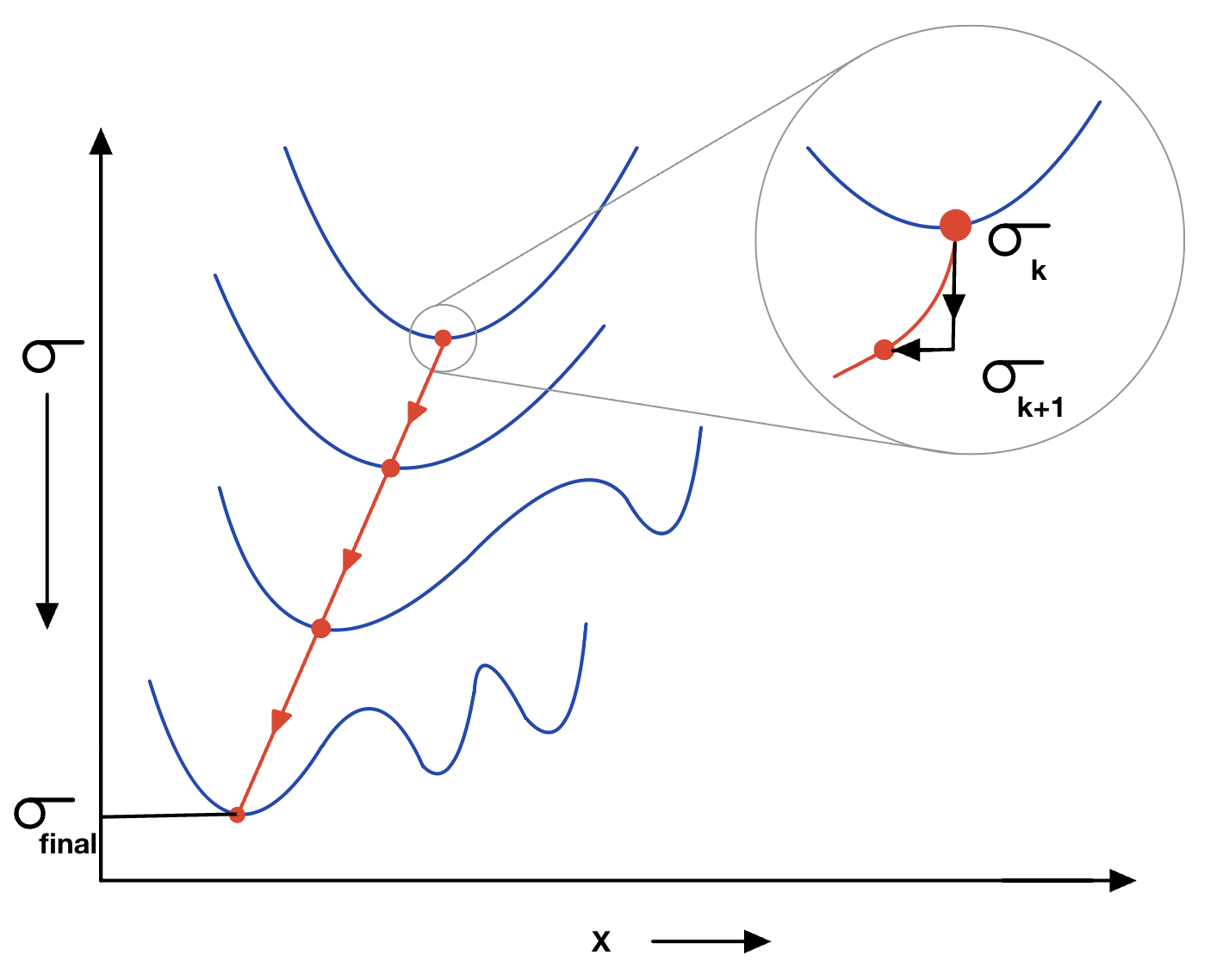
Given correspondences \(\left\lbrace \mathbf{a}_i, \mathbf{b}_i \right\rbrace\) between two unaligned 3D scans, find the transformation \(\mathbf{R},\mathbf{t}\) that aligns the scans. \begin{align*} \quad \min_{\left(\mathbf{R},\mathbf{t}\right)} \sum_{i=1}^{N} \rho_{\sigma}(\|\mathbf{a}_i -\mathbf{R} \mathbf{b}_i-\mathbf{t} \|) \end{align*} 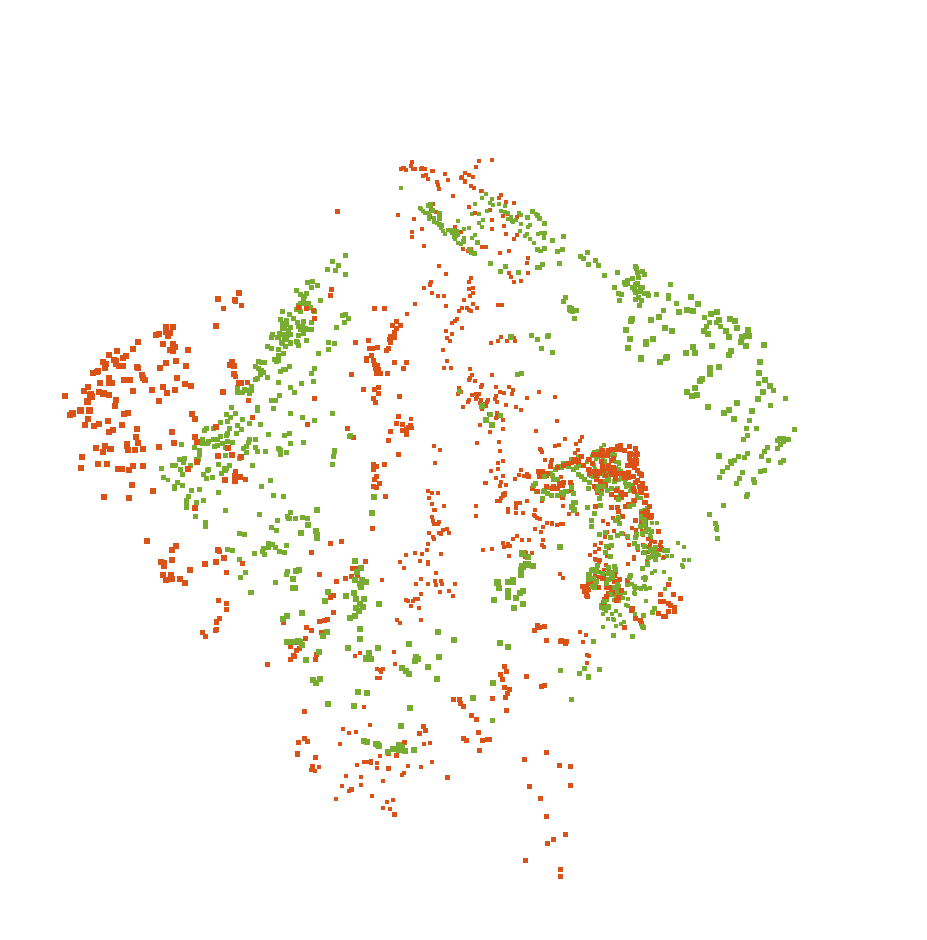 |
 |
 |
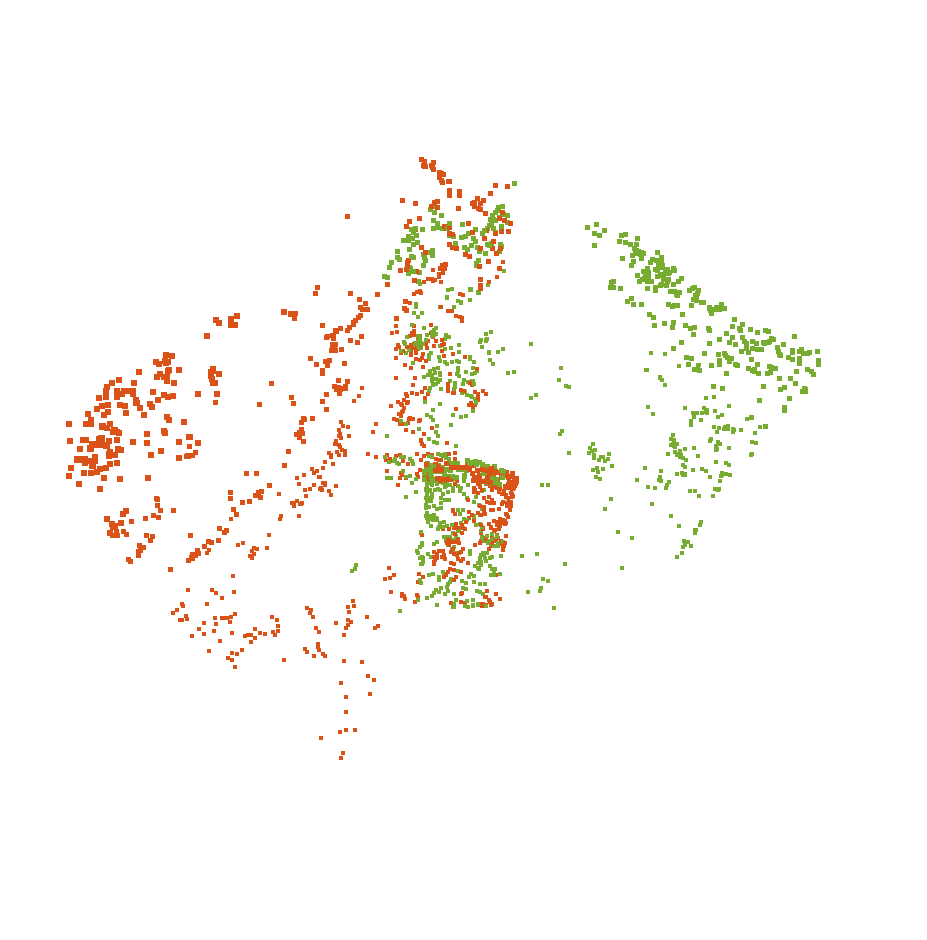 |
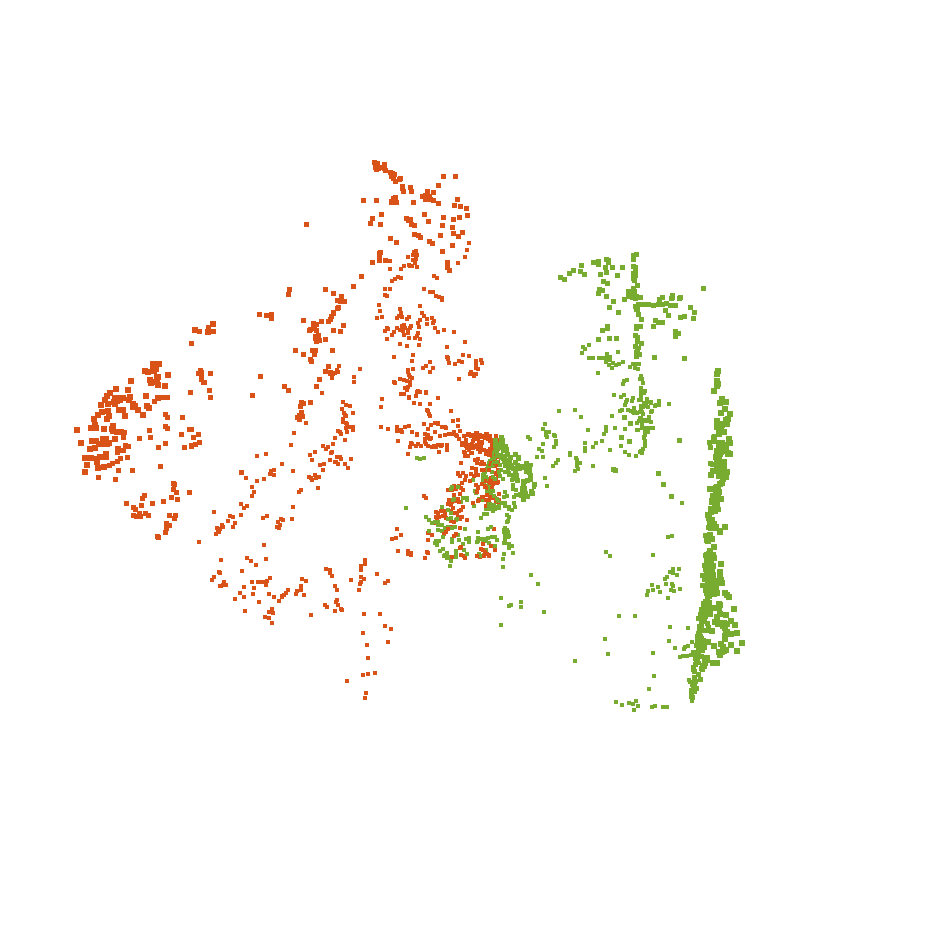
| SE3Reg | Teaser++ | GNCp (Ours) | Ground Truth |
Figure 2. Two point clouds (red and green) with a low overlap in the MIT Lab sequence of 3D Match dataset
Publication
- Adaptive Annealing for Robust Geometric Estimation , IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2023. [bibtex]
