
Avishek Chatterjee, Suraj Jain, Venu Madhav Govindu
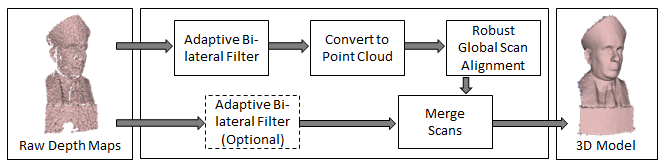
A system for building geometrically consistent 3D models using structured-light-stereo based depth cameras has been developed. While the commercial availability of such devices, like Kinect, has made obtaining depth images easy, the data tends to be corrupted with high levels of noise. In order to work with such noise levels, the problem of scan alignment is decopled from that of merging the aligned scans. The alignment problem is solved by using two methods tailored to handle the effects of depth image noise and erroneous alignment estimation. The noisy depth images are smoothed by means of an adaptive bilateral filter that explicitly accounts for the sensitivity of the depth estimation by the scanner. A robust method overcomes failures due to individual pairwise ICP errors and gives alignments that are accurate and consistent. Finally, the aligned scans are merged using a standard procedure based on the signed distance function representation to build a full 3D model of the object of interest. The performance of the system is demonstrated by building complete 3D models of objects of different physical sizes, ranging from cast-metal busts to a complete model of a small room as well as that of a complex scale model of an aircraft.
 |
 |
Publications
- A Pipeline for Building 3D Models using Depth Cameras , Indian Conference on Computer Vision, Graphics and Image Processing (ICVGIP), 2012. [bibtex]
