
In this work, we develop a depth-guided photometric 3D reconstruction method that works solely with a depth camera like the Kinect. Our method uses the in-built IR camera in such devices to obtain high quality normal estimates using photometric stereo and then from a depth-guided 3-D reconstruction of the object obtainable in each view, uses an effective multiview technique to reconstruct the full 3-D model of the object.

Figure 1. Full Reconstruction Pipeline
Figure 2 below shows the raw mesh obtained from a single depth map of Ganesh figurine from the Kinect. Figure 3 shows a single view reconstruction using 5 IR images and a depth map from a single view. Figure 4 shows the 3-view reconstruction using our method.
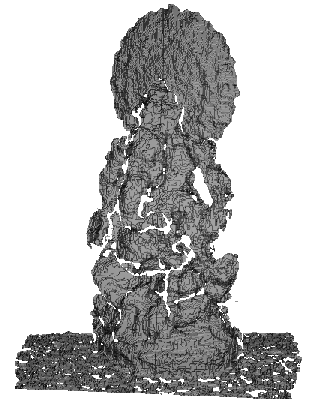
Figure 2. Raw Kinect Mesh |

Figure 3. Photometric Single View Reconstruction |

Figure 4. Photometric Multiple View Reconstruction |
Figure 5 below shows the full reconstruction using the raw Kinect depth maps of Buddha figurine. Figure 6 shows views of full reconstruction of the same using our method.

Figure 5. Reconstruction with Raw Kinect Depth maps |

Figure 6. Our Reconstruction |
Figure 7 below shows the fine details recovered using our method from novel views.
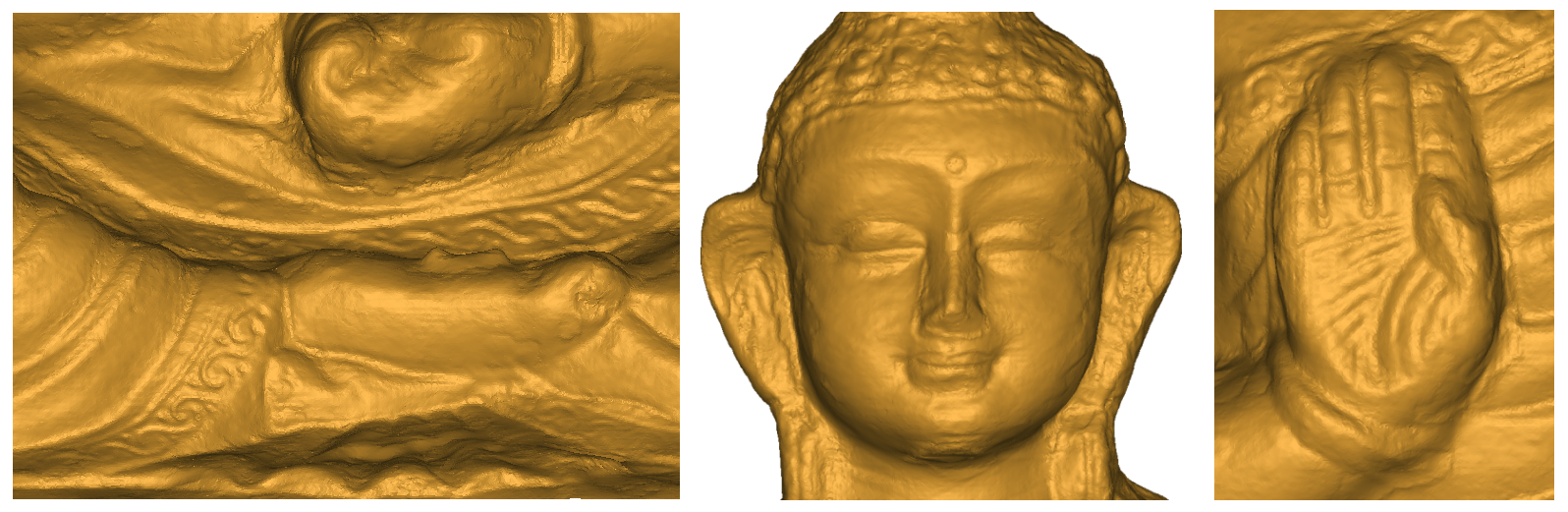
Figure 7. Novel Rendered Views |
Publications
- High Quality Photometric Reconstruction from a Depth Camera , IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2014. [bibtex] [pdf] [poster]
