
In this work, we propose a novel uncalibrated photometric method for refining depth maps of multi-albedo objects obtained from consumer depth cameras like Kinect. Existing uncalibrated photometric methods either assume that the object has constant albedo or rely on segmenting images into constant albedo regions. Our method does not require the constant albedo assumption and we believe it is the first work of its kind to handle objects with arbitrarily varying albedo under uncalibrated illumination.
Figure 1 below shows the colour image, Kinect's scan and our reconstruction of a 20 cm X 25 cm terracotta plaque of Hindu goddess Kali.
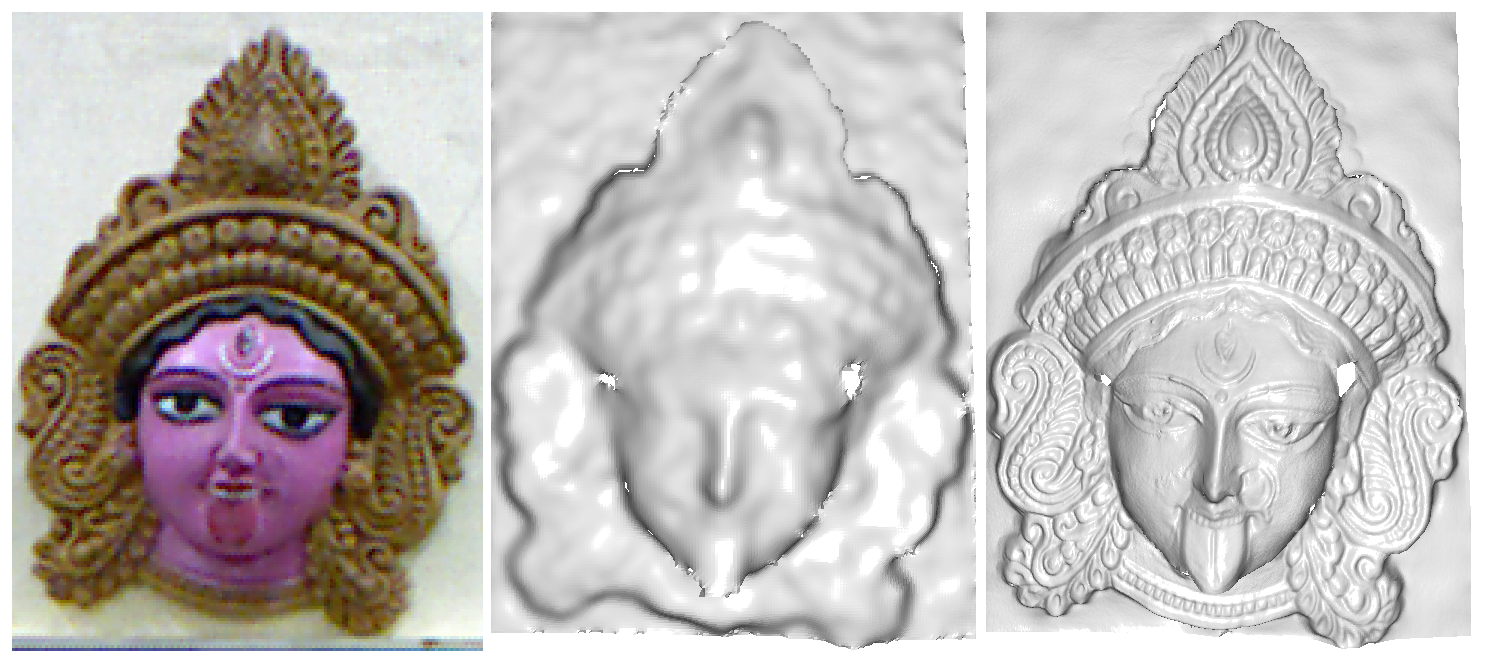
Figure 1. Reconstruction of terracotta plaque of Hindu goddess Kali |
Figure 2 below shows the raw Kinect's scan and our reconstruction of a 17 cm X 23 cm terracotta plaque of Rabindranath Tagore.

Figure 2. Reconstruction of terracotta plaque of Rabindranath Tagore |
Figure 3 below shows the infrared image, our reconstruction, magnified view of our reconstruction and recoverd relative albedo of a wooden craved plate of 20 cm diameter with a very complex texture.
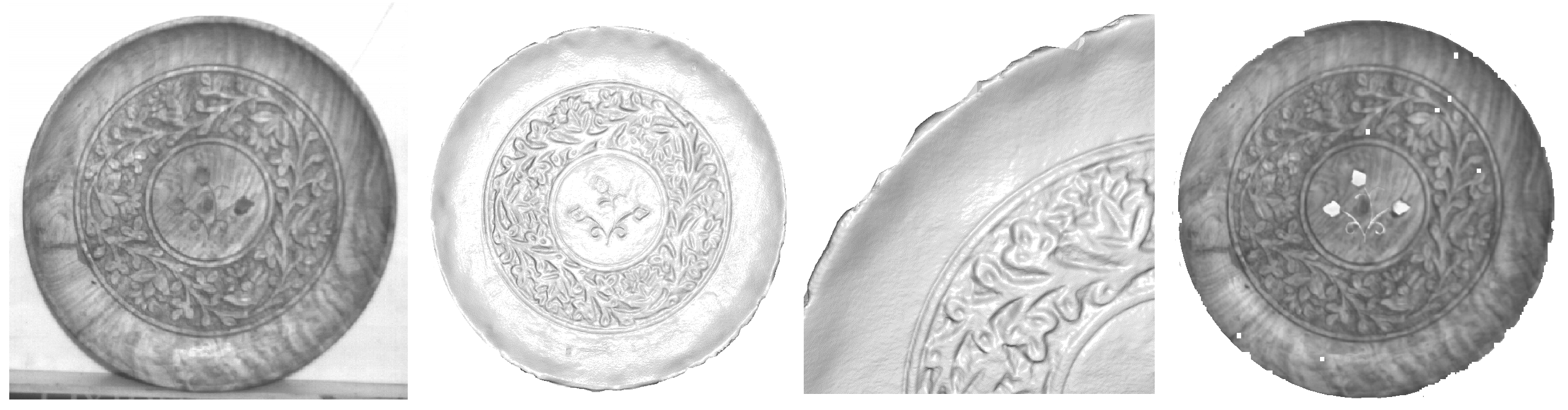
Figure 3. Reconstruction of a wooden carved plate |
Publications
- Photometric Refinement of Depth Maps for Multi-Albedo Objects , IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2015.
